Eletrônica — Esquemático Base Seguidor 1 (Pão de Queijo)
Sumário
- Metadados do esquemático
- Visualização do esquemático
- Alimentação e regulação
- MCU (ESP32) e pinagem relevante
- Motores, ponte H e encoders
- Sensores e E/S
- Observações de projeto (notas da folha)
- Resumo dos parâmetros principais
- Referências bibliográficas
- Histórico de versões
Metadados do esquemático
Os dados abaixo foram extraídos da exportação do esquemático (Seguidor1Base-2.jpg) e do projeto Seguidor1Base no Altium (documento Seguidor1Base-1.pdf, quando aplicável).
Tabela 1: Identificação do desenho (fonte: esquemático exportado)
| Campo | Valor indicado no desenho |
|---|---|
| Título | Esquemático Base Seguidor 1 |
| Arquivo de esquemático | Seguidor1Base.SchDoc |
| Folha | 1 de 1 |
| Revisão do documento | 26.04.2026 |
| Autor (campo APPROVALS / AUTHOR) | Henrique de O. Bernardes |
| Formato / escala (legenda) | A3 — escala 1:2 (campos SIZE / SCALE da borda) |
| Propriedade / distribuição | Documento Altium — texto padrão de propriedade na borda da folha |
Atenção
A figura interativa desta página usa dados/Seguidor1Base-2.jpg. O PDF do projeto, encontra-se em docs/pages/paoDeQueijo/dados/Seguidor1Base-1.pdf.
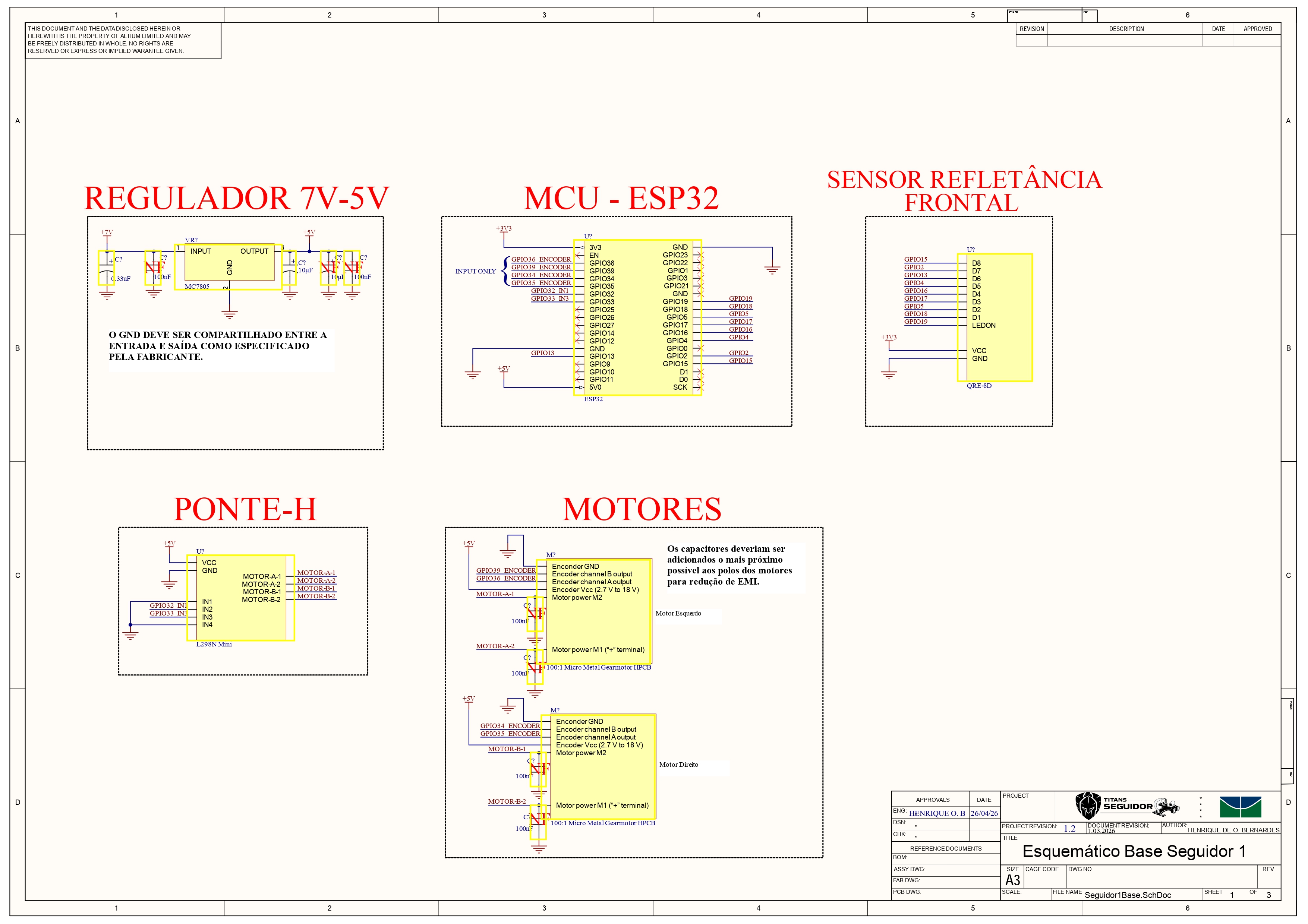
Visualização do esquemático
Figura 1: Esquemático robô pão de queijo
Alimentação e regulação
A folha descreve a cadeia de tensões e os reguladores associados ao barramento do robô.
Tensões e blocos citados no PDF
| Tensão / bloco | Observação (extraído do esquemático) |
|---|---|
| +7 V | Entrada associada ao bloco REGULADOR 7V-5V |
| +5 V | Barramento +5V — alimentação de periféricos e etapa de potência (ex.: ponte H / motores conforme folha) |
| +3V3 | +3V3 — típico para lógica do ESP32 e circuitos de 3,3 V |
| MC7805 | Regulador linear MC7805 (série 78xx, 5 V) com capacitores de entrada/saída indicados na folha |
Capacitores e filtragem (valores explícitos no texto do PDF)
| Valor | Contexto típico na folha |
|---|---|
| 10 µF | Desacoplamento / bulk próximo aos reguladores |
| 100 nF | Capacitores NF (notação “NF” na folha — uso de desacoplamento de alta frequência) |
| 0,33 µF | Associado à etapa do regulador (valor citado junto ao símbolo na folha) |
Detalhes — pinagem de alimentação no conector do ESP32 (trecho da folha)
No desenho aparecem, entre outros, os pinos lógicos do módulo MCU - ESP32: 3V3, EN, GND, 5V0 e diversos GPIO listados na borda do símbolo (ex.: GPIO36, GPIO39, GPIO34, GPIO35, GPIO32, GPIO33, GPIO25, GPIO26, GPIO27, GPIO14, GPIO12, GPIO13, GPIO9, GPIO10, GPIO11, etc.).
MCU (ESP32) e pinagem relevante
O núcleo do controle é o MCU - ESP32. A seguir, os pontos mais importantes mapeados a partir do texto do PDF (nomes de rede / rótulos na folha).
Encoders (quatro fios por eixo)
| Função na folha | GPIO (ESP32) |
|---|---|
| Encoder — canal associado a GPIO36 | GPIO36_ENCODER |
| Encoder — canal associado a GPIO39 | GPIO39_ENCODER |
| Encoder — canal associado a GPIO34 | GPIO34_ENCODER |
| Encoder — canal associado a GPIO35 | GPIO35_ENCODER |
Entradas digitais nomeadas na folha
| Sinal na folha | GPIO |
|---|---|
| IN1 | GPIO32_IN1 (GPIO32) |
| IN3 | GPIO33_IN3 (GPIO33) |
Observação de projeto (registrada no próprio PDF)
O GND DEVE SER COMPARTILHADO ENTRE A ENTRADA E SAÍDA COMO ESPECIFICADO PELA FABRICANTE.
Esta nota aparece explicitamente na folha, em geral associada ao regulador / exigência do fabricante do CI — deve ser respeitada no layout e na montagem.
Motores, ponte H e encoders
Ponte H
| Item | Valor / designação no PDF |
|---|---|
| CI ponte H | L298N Mini |
| Ramificação do desenho | Bloco PONTE-H / MOTORES alimentado em +5V (conforme rótulos da folha) |
Motores
| Lado | Motor citado |
|---|---|
| Motor esquerdo / direito | 100:1 Micro Metal Gearmotor HPCB (aparece nas duas metades do desenho) |
Encoder (parâmetros elétricos citados na folha)
| Parâmetro | Valor no PDF |
|---|---|
| Alimentação do encoder (Encoder Vcc) | 2,7 V a 18 V |
| Saídas | Encoder channel A output, Encoder channel B output |
| Referência de terra | Encoder GND |
Potência dos motores (rótulos do conector na folha)
- Motor power M1 (“+” terminal)
- Motor power M2
Nota de EMI (texto da folha)
Os capacitores deveriam ser adicionados o mais próximo possível aos polos dos motores para redução de EMI.
Sensores e E/S
Sensor de refletância frontal
| Item | Designação no PDF |
|---|---|
| Módulo | QRE-8D |
| Descrição na folha | SENSOR REFLETÂNCIA FRONTAL |
| Alimentação do bloco | VCC / GND (3,3 V no desenho, conforme rótulo +3V3 próximo ao símbolo) |
LEDs e barramento digital (trecho D0–D8)
A folha associa linhas nomeadas D8 … D0, LEDON e conexões a pinos do ESP32 (ex.: uso de prefixos NLGPIO* em várias redes — interpretação: nets nomeadas para roteamento / lógica no projeto Altium).
Observações de projeto (notas da folha)
- Terra comum do regulador: compartilhar GND entre entrada e saída conforme fabricante (texto integral na folha).
- EMI em motores: posicionar capacitores o mais próximo possível dos terminais dos motores.
- GPIO “input only”: na folha há região marcada como INPUT ONLY para determinados pinos do ESP32 — respeitar restrições do chip (pinos apenas de entrada no ESP32).
- Revisão e folhas: o arquivo analisado é a folha 1 de 3; blocos como MC7805, L298N, sensores e motores podem continuar nas demais folhas do mesmo
SchDoc.
Resumo dos parâmetros principais
Tabela 2: Parâmetros elétricos e funcionais destacados (fonte: esquemático — Seguidor1Base-2.jpg)
| Domínio | Parâmetro | Valor / atribuição |
|---|---|---|
| Alimentação | Réguas | +7 V → regulação; +5 V; +3,3 V |
| Regulador 5 V | CI | MC7805 + capacitores (10 µF, 100 nF, 0,33 µF conforme folha) |
| MCU | Modelo | ESP32 (rótulo “MCU - ESP32”) |
| Encoder | Faixa de Vcc | 2,7 V a 18 V |
| Motores | Tipo | 100:1 Micro Metal Gearmotor HPCB |
| Driver | Ponte H | L298N Mini |
| Linha | Sensor frontal | QRE-8D |
| GPIO | Encoders | 36, 39, 34, 35 |
| GPIO | Entradas IN1 / IN3 | 32, 33 |
Lista bruta de GPIO citados na borda do símbolo ESP32 (PDF)
Na ordem de aparição do texto extraído do PDF, a folha lista pinos entre outros: GPIO36, GPIO39, GPIO34, GPIO35, GPIO32, GPIO33, GPIO25, GPIO26, GPIO27, GPIO14, GPIO12, GPIO13, GPIO9, GPIO10, GPIO11, além de GPIO23, GPIO22, GPIO1, GPIO3, GPIO21, GPIO19, GPIO18, GPIO5, GPIO17, GPIO16, GPIO4, GPIO0, GPIO2, GPIO15, redes nomeadas com prefixo NLGPIO (convenção de net label no Altium), barramento SCK, D0/D1, etc. A validação final de conexão deve ser feita no próprio esquemático (nets e designators de componente).
Referências bibliográficas
[1] Projeto Altium Seguidor1Base — esquemático Esquemático Base Seguidor 1, autor Henrique de O. Bernardes. Exportação usada na documentação:
docs/pages/paoDeQueijo/dados/Seguidor1Base-2.jpg; PDF de referência:docs/pages/paoDeQueijo/dados/Seguidor1Base-1.pdf.[2] Espressif Systems. ESP32 Series Datasheet — pinout, limites de tensão por GPIO e notas de hardware. Consultar a versão aplicável ao módulo usado na montagem.
[3] STMicroelectronics / datasheet do L298 (família) — correntes máximas, dissipation e recomendações de GND comum e diodos de roda livre quando aplicável ao L298N Mini montado no projeto.
Histórico de versões
| Versão | Descrição | Autor(es) | Data de produção | Revisor(es) | Observações |
|---|---|---|---|---|---|
1.0 |
Modelagem inicial do readme | Felipe das Neves | 02/03/2026 | — | Conteúdo inicial curto. |
1.1 |
Página modelada (sumário, tabelas) e parâmetros extraídos do esquemático; visualização com Seguidor1Base-2.jpg em dados/ |
Felipe das Neves | 04/05/2026 | — | Imagem do esquemático no lugar do PDF embutido. |