Mecânica — Esquemático Seguidor 1 (Pão de Queijo)
Este documento detalha as especificações técnicas, escolhas de design e métricas da estrutura mecânica do robô seguidor de linha Pão de Queijo.
Sumário
- Metadados do esquemático mecânico
- Visualização do esquemático 3D (CAD)
- Chassi e Estrutura
- Sistema de Locomoção e Rodas
- Materiais
- Processo de Fabricação
- Análise de Massa e Centro de Gravidade
- Resumo dos parâmetros principais
- Referências bibliográficas
- Histórico de versões
Metadados do esquemático
Os dados abaixo foram extraídos das projeções técnicas geradas a partir da modelagem 3D.
Tabela 1: Identificação do desenho (fonte: esquemático exportado)
| Campo | Valor indicado no desenho |
|---|---|
| Título | Robô Pão de Queijo |
| Componente | Chassi |
| Software Utilizado | Fusion 360 |
| Revisão do documento | 07.05.2026 |
| Sistema de Medidas | Milímetros (mm) |
| Autor | Gustavo Emmanuel dos S. Rodrigues |
Visualização do esquemático CAD
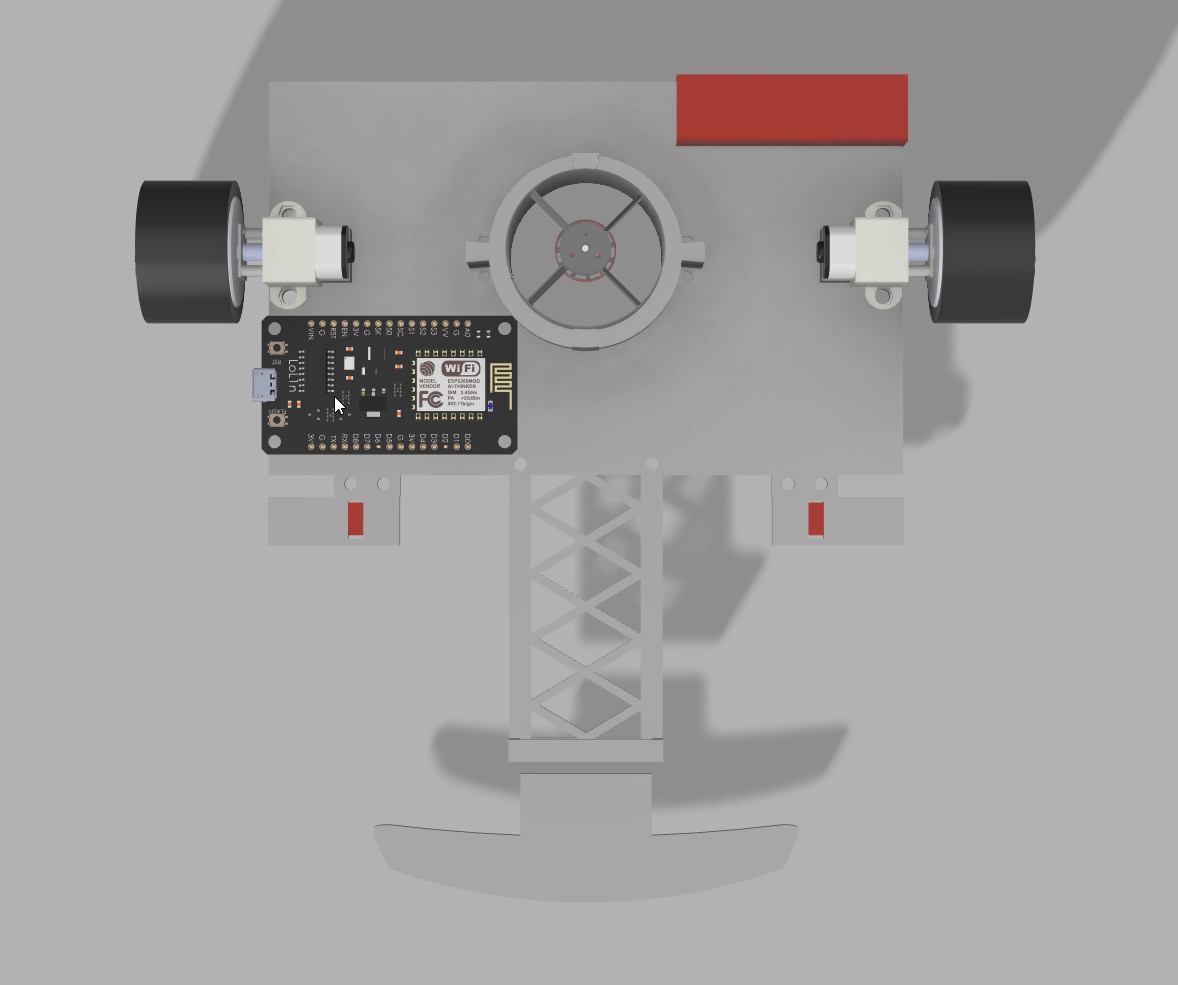
Figura 1: Vista Superior
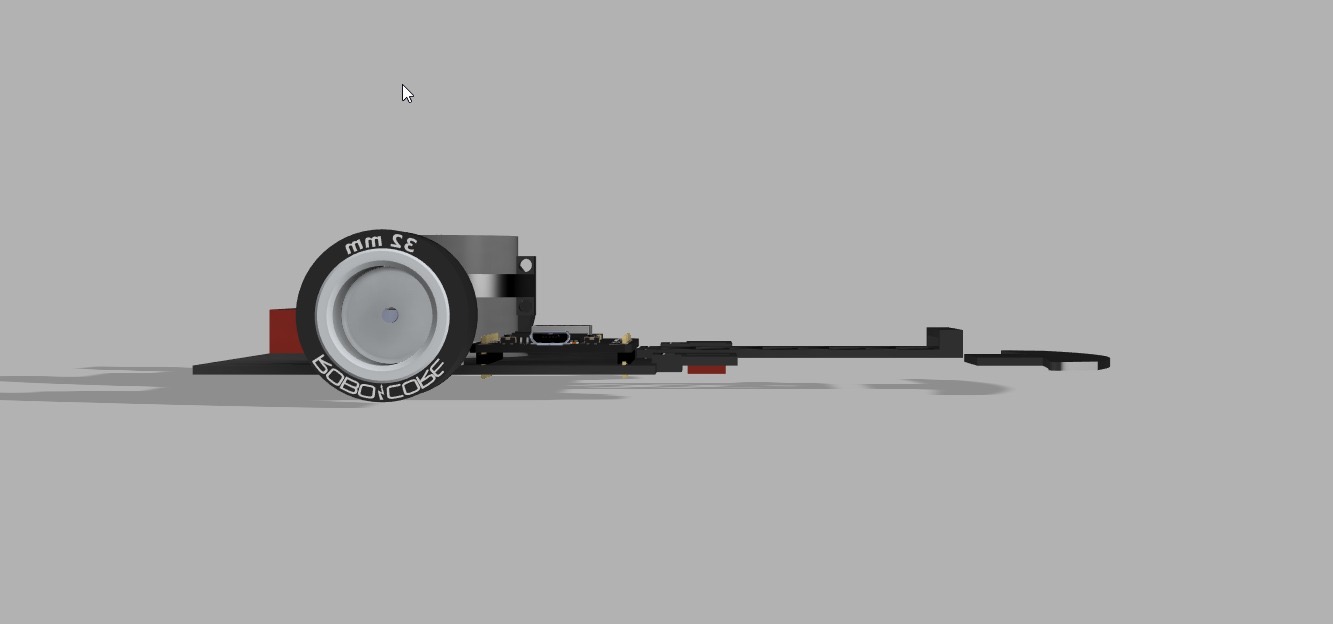
Figura 2: Vista lateral
Chassi e Estrutura
O chassi foi projetado utilizando uma abordagem de plataforma integrada, onde a rigidez estrutural é priorizada para suportar as forças G laterais durante curvas de alta velocidade.
Geometria e Dimensões
- Base Principal: Possui uma largura transversal de 145,00 mm, o que oferece uma ampla base de sustentação, reduzindo o risco de capotamento.
- Extensão Frontal (Haste): Uma haste de 70,00 mm projeta o array de sensores à frente do eixo de tração. Este comprimento foi calculado para otimizar o tempo de reação do algoritmo de controle (PID), permitindo que o robô antecipe a curva antes que o centro de massa a atinja.
- Design de Treliça: A haste frontal utiliza um padrão vazado em "X" (treliça), que reduz a massa na extremidade do robô, diminuindo o momento de inércia e evitando vibrações estruturais que poderiam causar ruído na leitura dos sensores.
Sistema de Locomoção e Rodas
O sistema de tração é composto por dois motores independentes posicionados lateralmente na base de 145mm.
-
Suportes de Motor:
-
Configuração de Apoio:
Materiais
Para garantir o equilíbrio entre peso e resistência, sugerem-se os seguintes materiais para a fabricação:
| Componente | Material | Justificativa |
|---|---|---|
| Placa Base | ||
| Haste Treliçada | ||
| Pneus |
Processo de Fabricação
-
Modelagem: Realizada no Fusion 360 com foco em parametrização.
-
Manufatura Aditiva:
3. Montagem:
Análise de Massa e Centro de Gravidade
A distribuição de peso foi planejada para manter o Centro de Gravidade (CG) o mais baixo possível e próximo ao eixo das rodas de tração.
- Massa Estimada: Dependente do infill (aprox. 150g - 250g para o chassi completo).
- Equilíbrio: O uso da treliça frontal de 70mm garante que o peso não fique excessivamente concentrado na frente, o que poderia sobrecarregar o apoio deslizante e gerar atrito desnecessário.
Resumo dos Parâmetros Principais
- Largura de bitola: 145,00 mm
- Comprimento da haste de sensores: 70,00 mm
- Largura do suporte de componentes: 30,00 mm
Referências Bibliográficas
- Autodesk Fusion 360 Documentation.
- Regulamentos de Competição de Robótica (Seguidor de Linha).
Histórico de Versões
| Versão | Descrição | Autor(es) | Data de Produção | Revisor(es) |
|---|---|---|---|---|
1.0 |
Modelagem inicial e documentação básica | Felipe das Neves | 02/03/2026 | ✓ |
1.1 |
Thamires Ellen | 10/05/2026 | ✓ |